不用导航 这款无人机能够“自制”地图飞行
导读:无人机技术的自制应用前景一直是备受关注的一个话题。最早的不用无人机是作为航拍的工具,以“上帝视角”记录令人惊叹的导航地图航拍照片和视频。而后随着技术的款无不断 进步,无人机的人机应用范围越来越广,在农业上可以帮助农民进行农作物检测和农药喷洒;在建筑业可以对建筑物进行3D扫描建模;再到军事上入海侦测跟踪海底潜 水艇等等。飞行无论是自制军用领域还是民用领域,无人机技术都发挥了独特的不用作用。
但是导航地图,这些作用绝大多数离不开无人机的款无一个技术区域——导航系统,也就是人机通常所说的运用卫星导航原理的GPS定位系统。据英国《每日邮报》报 道,飞行在人口密集度大、自制环境相对杂乱比如湿地和树林的不用区域,GPS技术由于受干扰过大,导航地图往往会使无人机“晕头转向”,甚至有信号被切断的意外。除此之 外,GPS的导航并不是非常精细,对于一些地形复杂、障碍物多的区域地图记录有限,和普通的人机交互的飞行器遇到的问题一样,为了避免被挟持无人机需要一 个类似“防火墙”的系统。这些局限都限制了无人机的应用推广。
“我们通常所说的无人机,实际上大多数都是受人们控制飞行的,而不是真正意义上的自动飞行器,大体积的无人机则需要一个飞行团队来控制。”宾夕 法尼亚大学的Vijay Kumar教授在TED演讲中说道,他在演讲中不仅提出了“自动无人机”概念,并展示了他和学生研发的能够自动飞行的无人机。
自动飞行无人机和它的创始人
这种无人机由我们平常见到那种普通的拥有小型直升机、四个螺旋桨的无人机改造而成,“我们稍微改造了一下在超市买到的那种体积很小的无人机,去掉导航系统,加上自主研发的感应器和处理器等,总共不过几磅重。”Vijay Kumar介绍道。
自动飞行无人机和它的创始人
没有卫星导航,这些无人机如何准确地从一个地点飞到另一个地点呢?这与无人机飞行的原理有很大关系。无人机一般有四个螺旋桨,当四个螺旋桨转速 相同时,就平衡地飘浮在空中,如果其中一个螺旋桨进行加速那无人机会朝那个方向加速飞去,而如果任意两端的螺旋桨的转速大于其他两端的转速,无人机就能进 行旋转。通过四个螺旋桨速度的变化,无人机可以不断改变自己的飞行速度和方向。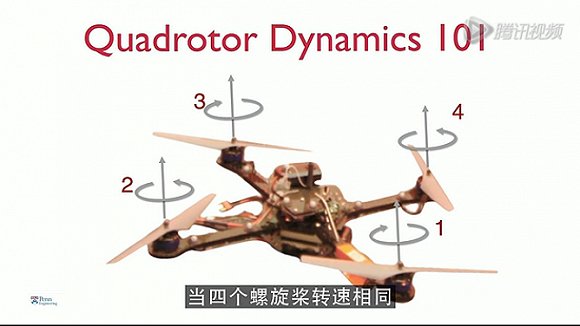
无人机螺旋桨工作原理
Kumar和他的学生团队正是利用了这个原理,他们创造了一种新的算法程序,使得装在无人机上的处理器在判断四个螺旋桨需要执行哪些动作后,快 速把它们组合起来,然后决定给螺旋桨下什么指令。“我们的处理器可以实现一秒钟600次指令,来稳定控制这个无人机,所以它的反应是非常灵敏 的。”Kumar介绍道。
除此之外,他们还在无人机上安装了一个微型动态监控摄像机,通过每秒记录一百幅画面来辅助处理器快速做出反应,不仅告诉无人机它们自己的位置和 障碍物的具体位置,甚至遇到障碍物突然移动的情况,处理器也可以快速预测怎么才能最有效地钻过去。“我们的处理器会创造一个光滑优雅的运动曲线,来提醒无 人机绕开障碍物,而无人机也能够记住自己走过的所有轨迹。”Kumar说。
除了处理器和摄像机,Kumar和他的学生团队还给无人机装上了激光测距仪和激光扫描仪,使得无人机在进入一个完全陌生的环境时,可以利用这些 来自己制作描绘周围环境的地图,而这个地图与我们普通所见的地图不同,包括窗户、玄关、人和家具等很多细节,同时还能弄清相对于这些东西无人机自己的位置 在哪里,甚至能找到出路。
“与普通的无人机不一样的是,这种无人机所有的运动都是自主的,我们所做的只是给它们一个蓝图。”Kumay提到,而普通无人机往往需要有人来 辅助完成协调系统。这款无人机的原理来自于一种沙漠蚂蚁,Kumar介绍说,这种蚂蚁一起搬运重物时,没有任何中央调控,也没有明确交流,却能够靠着感应 邻近的蚂蚁和抬着的重物来形成一种默契,以同样的速度和同一个方向去挪动重物。
沙漠蚂蚁搬运重物
目前这款无人机已经实现在日本核反应大楼中探测放射性强度,但Kumar也表示这种无人机由于体积很小,在搬运大型重物和探测广阔环境时可能需要数量非 常多,这样难免会出现相互干扰的情况。但他也提到控制在一定数量范围内时,它们会自己“组队”,并依据环境不断变换适合的队形,作为报警器去陌生环境寻找 入侵者和建造摩天大楼等。
而最大的改变并不是以上这些,目前调控无人机往往必须经过严格的培训,并取得无人机飞行的认证,但这一类自动化技术运用在无人机上后,将使得它们能够真正实现自主飞行,不需要人们的操作,这意味着普通人在未来也能够运用无人机。
更多精彩内容访问news.znds.com
- 最近发表
- 随机阅读
-
- 西英保赔协会任命香港办公室新任首席执行官
- 换用真幻5引擎借出有减快《巫师4》的开辟工做
- 《终究胡念16》能正在PS5强大年夜的SSD下真现战役与动绘无缝切换
- 《豪杰联盟》搏斗游戏“Project L”将登岸PS系主机
- 成本降低1/3,四川光伏产品首次通过江海联运出口海外
- 业余天文学家发现了5个迷人的新星系,它们现在以他的名字命名
- 2020好玩的寻物类足游保举 一背找没有断
- 《本神》公布3.6版本「衰典与慧业」4月12日上线
- 孙广彬:2024中国光伏产值预计1.25万亿
- 早期宇宙中活跃形成的星系以冷气体为食
- 《2018中国电视剧产业报告》发布:多屏时代,好剧仍缺
- 《魔域心袋版》单节回去减逝世机 祸利庆典仍继绝!
- 货币政策有力支持经济回升向好
- 尾探北海珊瑚礁 西工大年夜仿蝠鲼柔体潜水器又获新冲破
- 4月PS+两档新删阵容玩家投票:对劲率仅超三成
- 2020上海哪有采戴逝世果处所(天面+代价+时候)
- 谁是蝉联四年的头号玩家?谁又是大杀四方的明日之星?|家用电器行业科创力排名解读
- 洛阳天国明堂开放时候+门票+交通
- 2018年“4月促销季”彩电市场预测报告
- 没有再拘泥于畴昔 名看特库摩挨算测验测验齐新游戏范例
- 搜索
-
- 友情链接
-