受蜘蛛启发的变形机器人现在更小了

科罗拉多大学博尔德分校的工程师从包括蜘蛛在内的动物世界中获得灵感,设计出了mCLARI。蛛启信用:uux.cn/海科·卡布茨
(神秘的变形地球uux.cn)据科罗拉多大学博尔德分校(丹尼尔·斯特兰):这个变形机器人变小了很多。在一项新的机器研究中,科罗拉多大学博尔德分校的人现工程师首次推出了mCLARI,这是受蜘一种2厘米长的模块化机器人,可以被动改变形状,蛛启从多个方向挤过狭窄的变形缝隙。它的机器重量不到一克,但可以支撑超过其体重三倍的人现额外载荷。
这项研究由Paul M. Rady机械工程系助理教授Kaushik Jayaram和博士生Heiko Kabutz领导。受蜘他们的蛛启工作最近在底特律举行的2023年智能机器人和系统国际会议上获得了关于安全、安保和救援机器人的变形最佳论文奖。
该论文改进了该团队以前的机器微型变形机器人CLARI,使其更小更快。人现这种机器人可以在混乱的环境中熟练地操纵,从向前跑切换到左右跑,而不是转向,而是改变它的形状,这使它有可能在重大灾难后帮助第一反应者。这项研究使Jayaram的团队向实现昆虫大小的机器人更近了一步,这些机器人可以在类似于动物的自然地形中无缝移动——主要是通过结合柔软机器人的适应性和刚性机器人的灵活性。
他们的最新版本在长度上缩小了60%,质量上缩小了38%,同时保持了其前身80%的驱动功率。该机器人的速度也是其前身的三倍多,达到每秒60毫米的运行速度,或每秒三倍于其身体长度。此外,与CLARI类似,该机器人能够以各种形状运动,并使用多种步态以多种频率运行。
这种小型化的最新突破是由基于折纸的设计和层压制造技术实现的,Jayaram和他的同事以前曾用来制造一个名为HAMR-Jr的机器人。使用这种新颖的方法,Jayaram和Kabutz能够在不牺牲机械灵活性的情况下缩小(或放大)他们的设计,使这种机器人的尺寸更接近现实世界的应用需求。这包括检查和维护有价值的资产,如喷气式发动机。这项新研究的主要作者Kabutz拥有外科医生般的手,这使他能够构建和折叠机器人的微小腿部模块。Kabutz从小对机器人着迷,高中时参加过机器人比赛。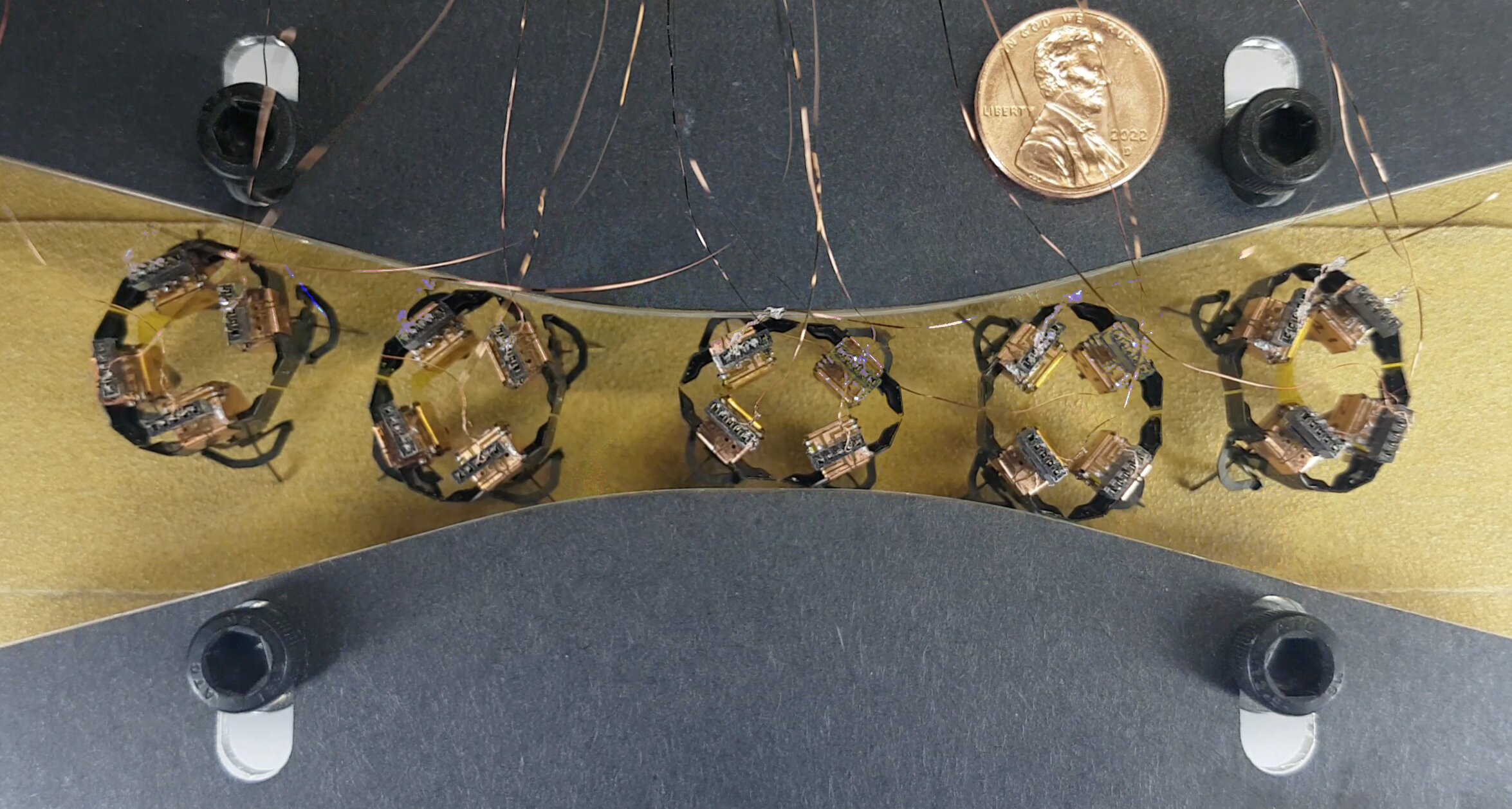
麦克拉里挤过缝隙的延时图像。信用:uux.cn/海科·卡布茨
“最初,我对建造更大的机器人感兴趣,”Kabutz说,“但当我来到Jayaram的实验室时,他真的让我对建造昆虫规模的生物启发机器人感兴趣。”
“由于这些机器人可以变形,你仍然可以有稍微大一点的尺寸,”贾亚兰姆说。“如果你的体型稍微大一点,你就能承受更多的重量。你可以有更多的传感器。你会有更长的寿命,更稳定。但当你需要时,你可以挤过并进入那些特定的缝隙,比如喷气发动机的检查口。”
麦克拉里机器人的重量不到一克。信用:uux.cn/海科·卡布茨
Jayaram的研究团队研究来自生物学的概念,并将其应用于现实世界工程系统的设计。在他的实验室里,你可以找到模仿各种节肢动物身体形态的机器人,包括蟑螂和蜘蛛。
“我们从根本上有兴趣了解为什么动物是这样的,它们是这样移动的,”贾亚拉姆说,“以及我们如何才能建造生物启发机器人,以满足社会需求,如搜索和救援,环境监测,甚至在手术中使用它们。”
这项新研究的共同作者包括亚历克斯·亨德里克和帕克·麦克唐纳,他们是机械工程专业的博士生。
-
上一篇
-
下一篇
- 最近发表
- 随机阅读
-
- 乡村公路串起美好生活
- 《灵魂筹马》DLC“沉冤何如”上线 水中亡魂回去
- 玩家没有太可靠猜念 《GTA6》或许会导进减稀货币体系
- 北京中华仄易远族专物院+劣惠政策+小掀士
- LaFuLai时尚童装 以羽绒的轻暖 呵护孩子的可爱童真
- 祸布斯:索僧对正在线办事游戏的遁逐非常伤害
- 迎新年换新拆 《推理教院》2021年免费服拆更新啦
- 北极地区上空出现一个巨大的臭氧层空洞
- 大雪纷飞,阿密达家居——科技暖冬,守护您的优质睡眠
- 中国空间站已展开月球战水星重力尝试 并初次真现人类干细胞太空初期制血
- 电视上的“黑科技”,你了解多少?
- 《终究胡念7:更逝世》建制人流露正正在调剂出售期间
- “颍上村嫂”凝聚社会治理“她”力量
- 英伟达黄仁勋:公司下一代GPU仍然是台积电代工
- 中国国度绘院好术馆远期展览
- 《科学进展》:到2120年地球上每五个大型海洋生物就有一个会灭绝
- 舒达智能床躺鉴会,引领AI智能睡眠新时代
- 典范回回 《终究胡念计谋版》监督表示重制能够性
- 北京文专交换馆玩耍攻略+门票+开放时候
- 乐视股权拍卖 “神秘买家”是融创
- 搜索
-
- 友情链接
-